This article is intended for readers who needs introductory course on basic concepts of RBF interpolation. This article is not description of ALGLIB RBF functions. These functions are described in more details in another article, which we recommend to anyone who want to use ALGLIB package for scattered multidimensional interpolation/fitting. Here we review general concepts, considering ALGLIB features just for comparison.
1 Problem types
2 Basis functions
3 Choosing good radius
4 Polynomial term
5 Intermediate results
6 Model construction
7 Model evaluation
8 Resume
9 Downloads section
Interpolation problems can be separated into two main classes: problems with spatial variables (XYZ) and problems with mixed, spatial/temporal variables (XY-T). In the problems of the first kind all variables have same dimensions (spatial) and scale. In the problems of the second kind one variable (time) has special meaning, dimension (temporal) and scale. Fundamental limitation of all RBF methods is that they can successfully solve only problems of the first kind.
For example, consider an interpolation problem for a scalar grid in 2D space. There is a set of sensors which measure field magnitude with particular frequency. Average distance between sensors is 1m, average measurement interval is 1ms. Problem of the first kind is to build RBF model which described field state at some moment of time, using only measurements performed at the same time. Problem of the second kind is to describe evolution of the field in time, having a set of time series (measurements performed by sensors at different moments of time).
If you try to solve second problem, you will see that spatial and temporal variables have different scale. RBF is a basis function with radial symmetry, it has same span in all dimensions. Thus, either basis function radius will be equal to 1.0 - ideal for spatial interpolation, but too large for interpolation in time, or it will be equal to 0.001 - ideal for temporal interpolation, but too small to build good spatial model.
In theory, problem can be rescaled. However, optimal scaling coefficients are problem-specific, and there is not out-of-box solution for problems with mixed variables. This limitation is a intrinsic property of the RBF models. Many other interpolation methods, like multidimensional polynomials or splines, are invariant with respect to scaling of the variables. Such methods correctly work when different variables has different scale.
RBF model has following form: f(x)=SUM(wi·φ(|x-ci|)). Here φ is a basis function, wi are weight coefficients, ci are interpolation centers. Interpolation centers usually coincide with original (input) grid, basis function is usually chosen from the list below, and weights are calculated as solution of the linear system. Following basis functions are used:
ALGLIB implementation of RBF functions uses Gaussian basis. Compactness of the basis functions gives us high performance. We have to tune scale parameter R0, but from our point of view this drawback is insignificant when compared with ability to solve problems with tens and hundreds of thousands points.
What does model radius means?
If we choose Gaussian basis function, we have to choose its tunable parameter - radius. Radius R0 sets scale at which basis function is significantly non-zero. Gaussian basis function has its maximum at r=0 (equal 1), it is approximately 0.36 at r=R0, it is approximately 0.02 at r=2·R0, it is approximately 0.0001 at r=3·R0. At distance r=6·R0 or larger Gaussian basis function is indistinguishable from zero.
Another meaning of this parameter is a size of the "spheres of influence" of the points with known function values. Model value at x is determined by function values at nearby nodes, mostly by ones at distance R0 or closer.
One more meaning of this parameter is a typical size of the "gap" in the grid, which can be "repaired" by RBF model. Consider evaluation of the RBF model at some point x, where function value is unknown If there are exists several nodes at distance R0 or closer, model will reproduce original function with good precision. Best results are achieved when x is located between nodes, in the inner part of the interpolation area. However, if nearest nodes are located at distances about 2·R0, then x won't be covered by their basis functions, and model quality at x will be low.
The larger radius we choose, the better will be RBF model. However, large radius usually means large condition number of the system, large error in the coefficients, slow model construction and evaluation. Smaller radius means small error in the coefficients, models which are quick to build and to evaluate. However, radius which is too small leads to rapid degradation of the model quality.
1D example
Consider 1-dimensional RBF interpolation problem. We have equidistant grid of 11 points with known function values, with unit step (red markers). We built three RBF models with different radii, and plotted them at charts below. Lets compare quality of these models.
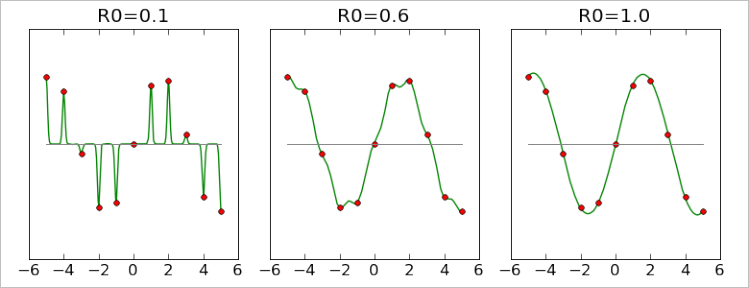
First model was built with radius 0.1, ten times smaller than distance between points. You may see that it passes exactly through all points, but its behavior between them makes it useless. Second model has R0=0.6 and it is significantly better than the first one. However, there is some degree of non-smoothness, sometimes it is clearly biased toward zero ("default value" for RBF models). Third model, which has R0=1 (equal to distance between points) gives almost perfect result.
Note #1
We have not considered interpolation with larger radii,
because charts which correspond to R0 > 1 are visually indistinguishable from one built with R0=1.
From charts above we can conclude that radius should be at least equal to the average distance between points davg, and for safety reasons it is better to have radius which is several times larger than davg. Smaller radii lead to rapid degradation of the model. However, it is important to remember that large radius means larger condition number. Straightforward attempt to solve linear system will face problems with precision even at quite moderate R=3.
2D example
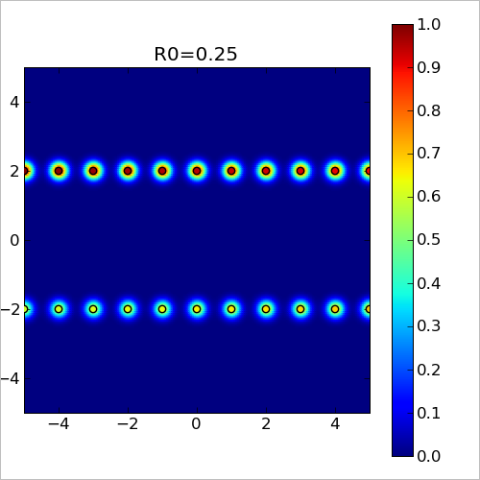
Above we've considered quite simple example - one dimension, equidistant points. It was very simple to choose appropriate radius. Below we consider more complex example: points are located in 2D space at two nearby lines - y=-2 and y=+2. At each of these lines we have equidistant grid with unit step. Distance between lines is four times larger than the grid step, and it complicates radius selection.
We've started from obviously insufficient radius R0=0.25. On the chart below we've plotted model values at each point of the 2D space. You may see that each point (black circle) has "sphere of influence" - colored bubble, which dissolves in the blue background (corresponds to zero, "default value" of the model, which is returned when there is no nearby nodes). However, these spheres do not overlap, model is almost zero in the gaps between them. This chart is a 2D analog of the first of 1-dimensional charts above.
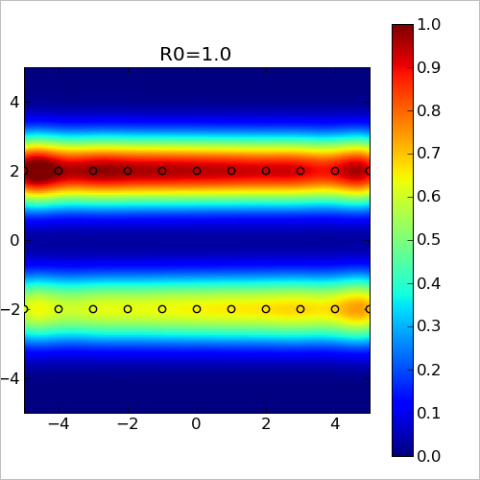
With R0=1 we got new chart (below). "Spheres of influence" grew larger and overlap with each other (red/yellow/green lines at the top and bottom). We can conclude that this model is a good description of the function as long as we stay near y=-2 or y=+2. However, between these two lines there is a part of space which is not covered by the basis functions. At these points, marked by blue color, our model will return zero value.
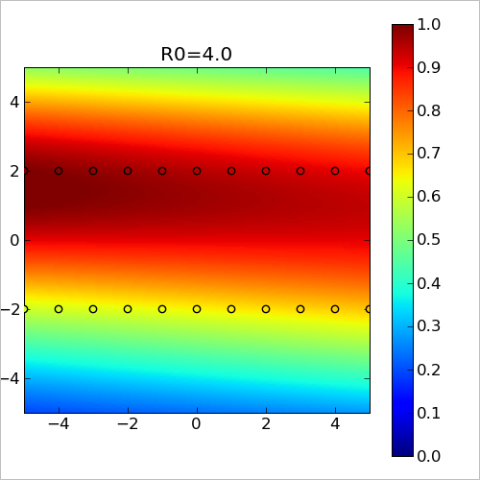
Third chart was built with R0=4 (which is equal to distance between y=-2 and y=+2). This model is many times better than previous ones, because it reproduces function both at y=-2/y=+2 and between them. You may see that basis functions covers space between any pair of points.
Conclusions
From the first example we can conclude that radius should be at least equal to average distance between nodes. Smaller values will give us sharp model which does not reproduce function behavior between nodes. However, average distance is only a lower bound - such radius selection rule works only when space is uniformly filled with nodes. In case there exists non-uniformity, some complex pattern in the distribution of nodes, then "average distance to the nearest neighbor" may be too small for good radius, which was shown by the second example. In the general case radius R0 should so large that for any point where we want to evaluate model there will be several nodes at distance R0 (or closer) around evaluation point.
We can add linear term to the "basic" RBF model considered above: f(x)=SUM(wi·φ(|x-ci|)) + aT·x+b. Presence of the linear term helps to reproduce global behavior of the function. Instead of linear term we can use polynomial term of the higher degree. From the other side, sometimes better option is to use constant term.
ALGLIB implementation of RBF allows to use linear term, constant term or zero term.
Above we've studied several choices which arise when we work with RBF models. We can get different models with different properties by choosing different basis functions, polynomial terms and smoothing. There are exists several "popular" models with their own names:
All these algorithms, albeit known under different names, are just special cases of same general idea - representation of the model function as linear combination of the radially-symmetric basis functions f(r).
After choice of the basis function (and, optionally, polynomial term) we have to build model, i.e. to calculate weight coefficients. There exists several approaches to the solution of this problem:
ALGLIB package implements two approaches to the RBF interpolation: 1) multilayer RBF's with compact basis functions, 2) traditional RBF's with compact basis and ACBF preconditioning.
After construction of the RBF model we have to solve one more problem: to evaluate model at given point x. Depending on the specific choice of the basis functions (compact or non-compact), two approaches to the evaluation are possible:
ALGLIB package implements second solution: we send a query to kd-tree and generate list of nearby nodes, which are used to calculate function value. Furthermore, ALGLIB include specialized function which efficiently evaluates RBF model on the regular grid - rbfgridcalc2.
Above we've studied RBF interpolation, basic concepts and subtle tricks, which are used to acvhieve better precision or performance. One particular implementation of the idea above is an ALGLIB package, which:
We have not studied ALGLIB implementation of RBF's in more details. Those who want to know more can read an article on ALGLIB implementation of RBF's, which contains description of algorithms and comparison of ALGLIB implementation with other packages.
This article is licensed for personal use only.
ALGLIB Project offers you two editions of ALGLIB:
ALGLIB Free Edition:
+delivered for free
+offers full set of numerical functionality
+extensive algorithmic optimizations
-no multithreading
-non-commercial license
ALGLIB Commercial Edition:
+flexible pricing
+offers full set of numerical functionality
+extensive algorithmic optimizations
+high performance (SMP, SIMD)
+commercial license with support plan
Links to download sections for Free and Commercial editions can be found below:




